Abstract
Shoulder pain and injury are highly prevalent among manual wheelchair users with spinal cord injury (SCI) [1-8] . The consequences of upper extremity (UE) pain are significant because manual wheelchair users rely on their arms for mobility and independence. Specific biomechanical parameters of wheelchair propulsion such as cadence, magnitude of force, and pattern of the hand during the no propulsive part of the stroke have been associated with risk of upper extremity injury. People who push with greater force have higher risk of developing nerve dysfunction and UE pain. Therefore, forces experienced at the shoulder during wheelchair propulsion should be reduced [9]. This paper presents a study where three tri-axis accelerometers placed on the upper arm, and under the wheelchair’s seat together with a wheelchair rotation monitor (WRM) were used to estimate the force applied during propulsion. Twenty six participants with SCI were asked to push their chair equipped with a SmartWheel (SMW) on level and sloped surfaces. The estimated force obtained by using a regression model based on bagging decision trees was compared with the force collected from the SMW. Mean absolute errors (MAE) and mean absolute percentage of error (MAPE) were calculated between the estimated and criterion values. Pearson’s Correlation Coefficients (R) and R2 were also calculated between the criterion and the estimated force. Results showed reasonable accuracy in determine force trend with a correlation coefficients ranging from 86 to 88%, but limited accuracy in determining the force value with mean absolute percentage of error ranging from 20 to 22.4%.
BACKGROUND
Increased use of upper limbs to perform daily activities in manual wheelchair users has been associated with high prevalence of Carpal Tunnel Syndrome (CTS), upper nerve injuries, hand, wrist, and shoulder pain. This incidence seems to be related to the duration of the Spinal Cord Injury [2]. Several studies have found shoulder pain to be the most common with prevalence between 71% and 73%, wrist pain prevalence between 53% and 55%, hand pain 43% and elbow pain 35%. UE pain is a common problem in individuals with SCI and has a negative impact on daily activities, decreasing their independence and quality of life [6, 7, 10] .
A study conducted by Boninger et al. among 60 people with SCI found that people who pushed with greater force had higher risk of developing nerve dysfunction [9]. Higher forces are correlated with UE injuries and pain. [8, 11, 12] . According to the Preservation of Upper Limb Function Following SCI, forces experienced at the shoulder during wheelchair propulsion should be reduced [11].
There are many monitoring tools and techniques that can be used to assess biomechanical parameters of wheelchair propulsion by individuals with SCI. However, many of these tools such as motion capture systems and sensing wheels can only be used in clinical settings. With the recent advancement of sensors and miniature technologies, accelerometers emerge as a possible solution for measuring user movements in their natural environments without requiring observation and complicated setups.
Several studies have investigated force of wheelchair propulsion by using different kinetic analysis system. A study conducted by Gil Agudo et al among 16 participants with SCI, used four camcorderds (Kinescan IBV) and a SmartWheel to analyze the change in forces during propulsion at two different speeds. The study found that forces and moments depended strongly on the propulsion speed, increasing in magnitude when speed increased [13]. Another study used electromyography data from the upper limb muscles to determine the force during propulsion between able bodied persons and people with paraplegia, the study concluded that greater muscle energy results in a greater resultant force in the shoulder and elbow, placing people with paraplegia at risk of developing upper extremity injuries [14]. A study conducted among novice and experienced wheelchair users, employed a two-dimensional energy model to verify hand-rim forces applied during dynamic wheelchair propulsion. Results demonstrate that predicted hand rim contact forces agree with experimental data throughout an extensive range of the push. The proposed model effectively verified the hand rim contact force patterns during dynamic propulsion [15]. Despite the ample research in understanding forces applied during propulsion, few studies have directly investigated the use of wearable sensors, like accelerometers, to estimate the force during propulsion. The purpose of this study was to use accelerometry data collected from wearable sensors and data from a WRM to estimate the force during propulsion.
METHODOLOGY
Experimental Protocol
The study was approved by the Institutional Review Board at the University of Pittsburgh. Subjects were recruited if they had SCI, were over 18 years old, and used a manual wheelchair for primary mobility. The exclusion criteria were: inability to tolerate sitting for more than two hours, and presence of upper limb pain that limits mobility. Subjects were required to answer a demographic survey and a Wheelchair Users Shoulder Pain Index (WUSPI) questionnaire. Participants were asked to propel their own wheelchairs on two surfaces including level surface (distance 33 meters) and sloped surface (distance 15 meters). A total of 24 level-surface trials performed at self-selected speed, low speed, and fast speed, and 12 sloped-surface trials at a self-selected speed were completed by each subject. For all propulsion trials, subjects’ wheels were replaced with a SMARTWheel (Three Rivers Holding Inc., Mesa AZ) with a sampling frequency of 240 Hz. at the dominant side and a dummy wheel at the other side to balance the weight of the SMARTWheel (SMW). In addition, monitoring devices consisting of three tri-axis accelerometers (Shimmer Research, Dublin, Ireland) and a custom wheelchair rotation monitor (WRM) were used to track upper limb movements of the subjects and the wheelchair motion. Two accelerometers with sampling frequency of 20 Hz. were placed on the upper arm and wrist respectively. A third accelerometer with sampling frequency of 60 Hz. was placed on the axle beneath the seat. All trials were videotaped using a hand-held digital video recorder. The video recorder and all the devices used were synchronized against the same clock.
Data Analysis
Custom MATLAB® (Version 7.11.0 R2010b, The Mathworks, Inc USA) was used to process the data. The criterion force was measured by the SMARTWheel that can measure 3-D forces and moments occurring at the push rim. The use of the SMARTWheel did not change the camber, axle position, or diameter of the subjects’ normal pushrim.
Data from the wheel rotation monitor was converted to the wheel speed. A set of statistical measures was calculated for each accelerometer and the speed data using 10-second windows. These statistical measures included: mean, root mean square, mean absolute deviation, zero crossing rate, mean crossing rate, range, energy, entropy, and correlation between each component and the resultant.
The calculated statistical measures together with the participants’ demographics such as age, gender, level of injury, weight and years of experience using a wheelchair were used to build a feature matrix that was fed into the Waikato Environment for Knowledge Analysis (WEKA version 3.6 1999-2012). Five regression models where generated by selecting different combinations of the sensors. The regression models were built based on bagging decision trees with a 10-fold cross validation. Mean absolute error, mean percentage of error, and Pearson Correlation Coefficient (R) and R2 were also calculated between the criterion force and the estimated force.
RESULTS
Twenty six participants including six females and 20 males with SCI and an average age of 40±14 years were tested in the study. The number of years that subjects had been using a manual wheelchair was 12±8 years and all subjects use their wheelchair over eight hours a day. The Wheelchair User Shoulder Pain Index questionnaire (WUSPI) measures shoulder pain based on 15 questions with each question on a 10 cm visual analogue scale, resulting in a total score range from 0cm (no pain) to 150cm (extreme pain) [16]. The mean score among participants was 7.7 ± 12.9 cm. The top three common activities with the highest pain score were: pushing up ramps or inclines outdoors, pushing for 10 minutes or more, lifting objects down from an overhead shelf.
Table 1 shows the mean and standard deviation (SD) of the criterion force obtained from the SMARTWheel and the estimated force from each regression model. Table 2 shows the number of predictors used on the regressions and the R2 between the criterion and the estimated force. Table 3 lists the selected predictors for each regression model. Figure 1 shows a scatter plot between the criterion and estimated force for one of the regression models.
|
SMW Force (N) |
Estimated Force (N) |
MAE |
MAPE (%) |
Arm Wrist Seat WRM |
37.8 ± 21.2 |
37.8 ± 18.1 |
6.8 ± 7.4 |
20.7 ± 25.8 |
Arm Seat WRM |
37.8 ± 21.2 |
37.7 ± 17.8 |
7.0 ± 7.4 |
22.1 ± 27.08 |
Wrist Seat WRM |
37.8 ± 21.2 |
37.7 ± 17.8 |
7.3 ± 7.8 |
22.3 ± 27.0 |
Arm Wrist WRM |
37.8 ± 21.2 |
37.8 ± 17.9 |
7.0 ± 7.5 |
21.2 ± 26.1 |
Wrist WRM |
37.8 ± 21.2 |
37.8 ± 17.9 |
7.3 ± 7.7 |
22.3 ± 26.6 |
|
Arm+Wrist+Seat+WRM |
Arm+Seat+WRM |
Wrist+Seat+WRM |
Arm+Wrist+WRM |
Wrist+WRM |
Predictors |
11 |
10 |
7 |
10 |
6 |
R |
0.879 |
0.875 |
0.864 |
0.876 |
0.866 |
R2 |
0.773 |
0.765 |
0.746 |
0.767 |
0.751 |
|
Predictors |
Arm+Wrist+Seat+ WRM |
rootmeansquare_x_Arm, standardeviation_xyz_Arm, entropy_xyz_Arm standardeviation_x_Wrist, standardeviation_y_Wrist, rootmeansquare_y_Wrist, mean_xyz_Wrist, entropy_z_Seat, mean_v, Weight, Years of experience |
Arm+Seat+WRM |
mean_x_Arm, magnitude_x_Arm, standardeviation_z_Arm, correlation_xyz_Arm, standardeviation _y_Seat, correlation_y_Seat, correlation_z_Seat, rootmeansquare_v, Weight, Years of experience |
Wrist+Seat+WRM |
standardeviation_x_Wrist, standardeviation_y_Wrist, mean_xyz_Wrist, rootmeansquare_xyz_Wrist, entropy_z_Seat, standardeviation_v, Weight |
Arm+Wrist+WRM |
rootmeansquare_x_Arm, standardeviation_xyz_Arm, entropy_xyz_Arm, standardeviation_x_Wrist, standardeviation_y_Wrist, rootmeansquare_y_Wrist, mean_xyz_Wrist, mean_v, Weight, Years of experience |
Wrist+WRM |
standardeviation_x_Wrist, standardeviation_y_Wrist, mean_xyz_Wrist, rootmeansquare_xyz_Wrist, std_v, Weight |
Discussion
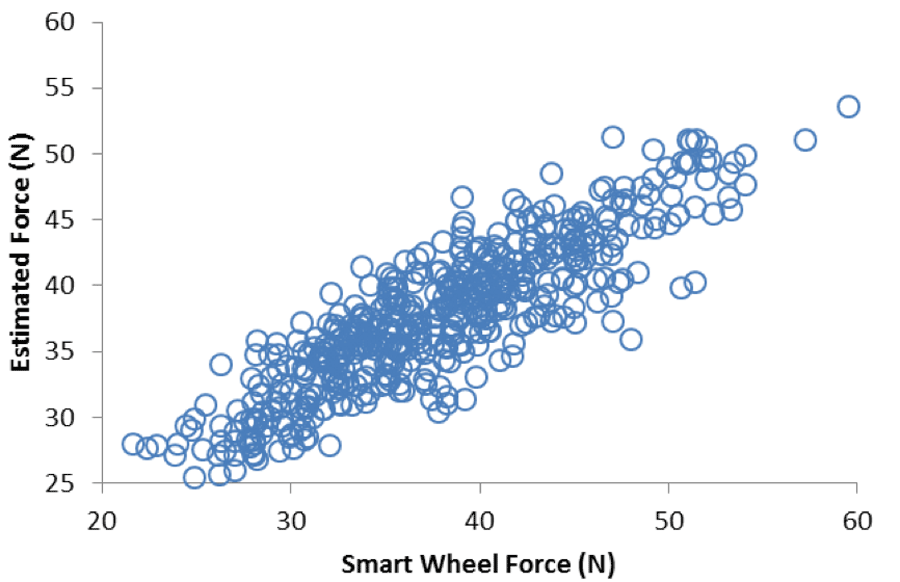 Figure 1: Criterion and Estimated Force
Figure 1: Criterion and Estimated Force This study provides insight into the usage of portable devices (e.g., 3-axis accelerometer and wheel rotation monitor) to estimate force during propulsion. We evaluated the performance of 5 regression models generated from different sensors combinations. Results in table 1 shows that the regression model with the lowest mean absolute percentage of error (MAPE) was the model built with data from the 5 sensors altogether, followed by the model build with just the upper arm accelerometers and the WRM. The relatively high correlation coefficients between the estimated and the criterion (Table 2) indicate the capability of portable sensors to estimate force trend during propulsion. However, a percentage of error ranging from 20 to 22% suggests that wearable sensors are not accurate enough to precisely quantify force values during propulsion.
When looking into the predictors of the regression models, we note that the body weight was a significant predictor on all models. This is consistent with a previous study conducted by Boninger et al. that found that subject weight was related to push rim forces and median nerve function [17, 18] . The average number of predictors among the different regression models was 9 with the highest number of predictors being 11. Predictors were selected from a set of 109 attributes considering the individual predictive ability of each one, along with the degree of redundancy between them [19].
Despite the numerous injuries occurring in MWUs, and the high prevalence of upper extremity pain and injury, push rim forces have not been extensively studied. Developing a system for measuring push-rim forces is complex [20]. Previous studies have tried to measure push rim forces using inverse dynamic models [21], external devices such as sensing push rims and smart wheels [8, 22] . This study has shown that combining the upper limb accelerometer and wheel rotation monitor has the potential to detect force trends during propulsion.
According to the Clinical Practice guideline on the preservation of upper extremities after SCI, a reduction in the force applied during propulsion, may reduce the risk of developing UE pain and injury [11]. Considering the negative impact that upper limb pain and injuries have among manual wheelchair users with SCI, it is necessary to monitor and understand how the use of upper limbs during wheelchair propulsion and other ADLs are related to such pain and injury. This study is a first step toward the development of a device capable of monitoring force trends during propulsion that could contribute to the preservation of upper limb functions among manual wheelchair users with SCI.
References
- Impink Bg Fau - Collinger, J.L., M.L. Collinger Jl Fau - Boninger, and M.L. Boninger, The effect of symptoms of carpal tunnel syndrome on ultrasonographic median nerve measures before and after wheelchair propulsion. (1934-1563 (Electronic)).
- Yang J Fau - Boninger, M.L., et al., Carpal tunnel syndrome in manual wheelchair users with spinal cord injury: a cross-sectional multicenter study. (1537-7385 (Electronic)).
- Boninger Ml Fau - Impink, B.G., et al., Relation between median and ulnar nerve function and wrist kinematics during wheelchair propulsion. (0003-9993 (Print)).
- Burnham RS, S.R., Upper extremity peripheral nerve entrapments among wheelchair athletes: prevalence, location, and risk factors. Am J Phys Med Rehabil, 1994.
- Jain Nb Fau - Higgins, L.D., et al., Association of shoulder pain with the use of mobility devices in persons with chronic spinal cord injury. (1934-1482 (Print)).
- Sie Ih Fau - Waters, R.L., et al., Upper extremity pain in the postrehabilitation spinal cord injured patient. (0003-9993 (Print)).
- Dalyan M Fau - Cardenas, D.D., B. Cardenas Dd Fau - Gerard, and B. Gerard, Upper extremity pain after spinal cord injury. (1362-4393 (Print)).
- Mercer Jl Fau - Boninger, M., et al., Shoulder joint kinetics and pathology in manual wheelchair users. (0268-0033 (Print)).
- Boninger Ml Fau - Koontz, A.M., et al., Pushrim biomechanics and injury prevention in spinal cord injury: recommendations based on CULP-SCI investigations. (0748-7711 (Print)).
- Pentland We Fau - Twomey, L.T. and L.T. Twomey, The weight-bearing upper extremity in women with long term paraplegia. (0031-1758 (Print)).
- Preservation of upper limb function following spinal cord injury: a clinical practice guideline for health-care professionals.
- Raina S Fau - McNitt-Gray, J.L., et al., Effect of increased load on scapular kinematics during manual wheelchair propulsion in individuals with paraplegia and tetraplegia. (1872-7646 (Electronic)).
- Gil-Agudo A Fau - Del Ama-Espinosa, A., et al., Shoulder joint kinetics during wheelchair propulsion on a treadmill at two different speeds in spinal cord injury patients. (1476-5624 (Electronic)).
- Dubowsky Sr Fau - Sisto, S.A., N.A. Sisto Sa Fau - Langrana, and N.A. Langrana, Comparison of kinematics, kinetics, and EMG throughout wheelchair propulsion in able-bodied and persons with paraplegia: an integrative approach. (0148-0731 (Print)).
- Lin Cj Fau - Lin, P.-C., et al., Prediction of applied forces in handrim wheelchair propulsion. (1873-2380 (Electronic)).
- Curtis Ka Fau - Roach, K.E., et al., Development of the Wheelchair User's Shoulder Pain Index (WUSPI). (0031-1758 (Print)).
- Boninger Ml Fau - Cooper, R.A., et al., Wheelchair pushrim kinetics: body weight and median nerve function. (0003-9993 (Print)).
- Brose Sw Fau - Boninger, M.L., et al., Shoulder ultrasound abnormalities, physical examination findings, and pain in manual wheelchair users with spinal cord injury. (1532-821X (Electronic)).
- Hall, M.A., Correlation-based Feature Selection for
- Machine Learning, in Department of Computer Science1999, The University of Waikato: Hamilton, New Zealand. p. 178.
- Boninger Ml Fau - Cooper, R.A., et al., Three-dimensional pushrim forces during two speeds of wheelchair propulsion. (0894-9115 (Print)).
- Desroches G Fau - Aissaoui, R., D. Aissaoui R Fau - Bourbonnais, and D. Bourbonnais, Relationship between resultant force at the pushrim and the net shoulder joint moments during manual wheelchair propulsion in elderly persons. (1532-821X (Electronic)).
- Lenton Jp Fau - van der Woude, L.H.V., et al., Hand-rim Forces and Gross Mechanical Efficiency at Various Frequencies of Wheelchair Propulsion. (1439-3964 (Electronic)).
Acknowledgements
This research was supported by RERC SCI Research Center(#H133E070024). We gratefully acknowledge the contributions of Shivayogi Hiremath and Annmarie Kelleher.